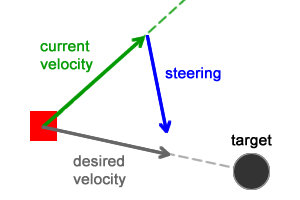
The seek behavior described previously is based on two forces that push the character towards the target: the desired velocity and the steering.
desired_velocity = normalize(target - position) * max_velocity
steering = desired_velocity - velocityThe desired_velocity, in this case, is the shortest path between the character and the target. It is calculated by subtracting the target's position from the character's position. The result is a force vector that goes from the character towards the target.
The flee behavior uses those same two forces, but they are adjusted to make the character run away from the target:
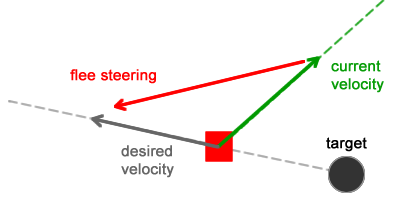
That new desired_velocity vector is calculated by subtracting the character's position from the target's position, which produces a vector that goes from the target towards the character.
The resulting forces are calculated almost the same way as in the seek behavior:
desired_velocity = normalize(position - target) * max_velocity
steering = desired_velocity - velocityThe desired_velocity in that case represents the easiest escaping route the character can use to run away from the target. The steering force makes the character abandon its current route, pushing it towards the direction of the desired velocity vector.
Comparing the desired velocity vector of the flee behavior with the desired velocity vector of the seek behavior, the following relation can be established:
flee_desired_velocity = -seek_desired_velocityIn other words, one vector is the negative of the other.
Adding Escape Forces
After the steering force is calculated it must be added to the character's velocity vector. Since that force is pushing the character away from the target, every frame the character will stop moving towards the target and start moving away from it, producing a flee path (the orange curve in the figure below):
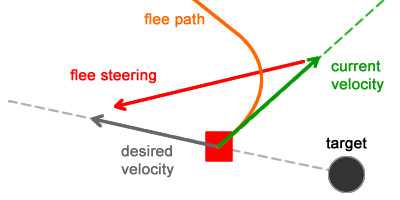
The addition of those forces and the final velocity/position calculation are handled in the same way as before.